
Пример решения задачи по определению для данного положения механизма скорости и ускорения точек кривошипа вращающегося с заданной угловой скоростью и угловым ускорением против хода часовой стрелки.
Задача
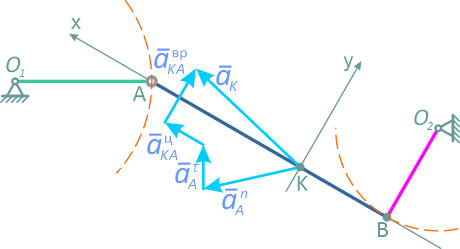
Для данного положения механизма, изображенного на рисунке 2.26, определить скорости и ускорения точек B и K.
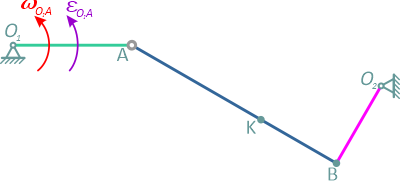
Известны: O1A=20см, АВ=40см, О2В=15см, АК=25см, ∠О1АВ=150о, ∠О2ВА=90о.
Кривошип O1A в данный момент вращается с угловой скоростью ωО1А=2 с-1 и угловым ускорением εО1А=2 с-2 (против хода часовой стрелки).
Другие примеры решений >
Помощь с решением задач >
Решение
В данном механизме точки А и B могут перемещаться по дугам окружностей с радиусами O1A и О2В соответственно, шток АВ совершает плоскопараллельное движение.
Определим скорость точки А:
![]()
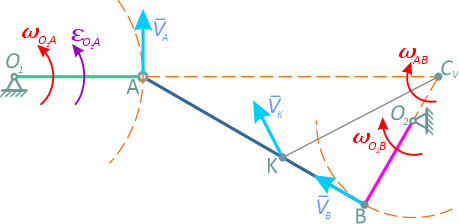
Скорость точки А перпендикулярна отрезку O1A и направлена вверх. Скорость точки B, как точки, вращающейся вокруг точки О2, перпендикулярна О2В, в нашем случае направлена вдоль линии АB.
Определим скорости точек B и K разными способами:
1) По теореме о скоростях точек в плоскопараллельном движении можно написать:
![]()
Точка A выбрана за полюс, т.к. о ней все известно; направления линий, вдоль которых направлены VB и VBA, также известны.
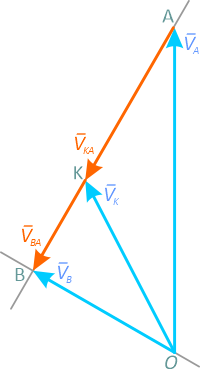
Строим соответствующий формуле (2.17) треугольник (рисунок 2.28). Из произвольной точки в масштабе откладываем вектор VA с соответствующим направлением. Из конца вектора VA проводим линию, перпендикулярную линии, проходящей через шток АB. Часть этой линии будет соответствовать вращательной скорости точки B вокруг полюса А. Длину вектора VBA получим, если из точки O проведем линию, параллельную скорости точки B.
Получившийся в результате такого построения треугольник соответствует формуле (2.17). Величины векторов VB и VBA можно получить, умножив длины стрелок на масштаб.
Если построение выполнялось не в масштабе, а лишь с соблюдением геометрии, то можно воспользоваться теоремой синусов:
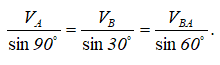
Из этого соотношения определяются величины VB и VBA соответственно:
Определив скорость точки B во вращательном движении вокруг точки А (VBA), можно определить угловую скорость штока АB:
Направление вектора VBA показывает, что вращение точки B вокруг точки А и, соответственно, штока АB происходит в направлении хода часовой стрелки (рисунки 2.27, 2.28).
Для определения скорости точки K можно написать

Этот вектор также как и VBA перпендикулярен линии, проходящей через точки А и B, и на рисунке 2.28 он будет отложен по вектору VBA. Можно написать соотношение:
которое определяет положение точки K на линии AB и тем самым определяет величину и направление вектора VK (рисунок 2.28):
2) Скорость точки B может быть определена другим способом: с помощью следствия из теоремы о скоростях точек в плоскопараллельном движении (см. раздел 2.3.1.2).
Для данной задачи это следствие запишется
3) На практике более распространен способ определения скоростей точек в плоскопараллельном движении с помощью мгновенного центра скоростей (МЦС). Он находится в точке пересечения перпендикуляров к скоростям точек движущегося тела и для шатуна может быть записано соотношение (рисунок 2.27):
Так как геометрия механизма известна, то все расстояния и величины скоростей определяются:

Определив скорость точки B, которая принадлежит и штоку AB и звену О2В, можно найти угловую скорость О2В:
Для определения ускорений точек B и K определим ускорение точки A, вращающейся вокруг неподвижного центра О1:
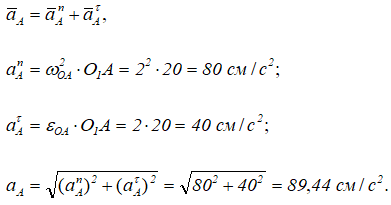
Приняв точку A за полюс запишем
В последней формуле первые два слагаемых известны, а третье можно определить:
![]()
Этот вектор направлен от точки B к полюсу A.
Вращательное ускорение точки B вокруг A — aBAвр — по величине не определяется, но известно его направление:

Учитывая, что точка B принадлежит двум звеньям и что звено О2В вращается вокруг неподвижной точки О2, можно написать формулу
и, следовательно,

В формуле (2.18) aBn — нормальное ускорение точки B при вращении вокруг О2 известно:
![]()
Этот вектор направлен от точки B к точке О2. Вектор aBτ известен только по направлению:

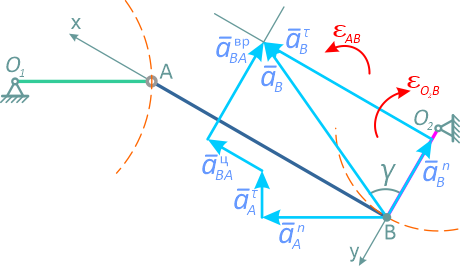
В формуле (2.18) две неизвестные по модулю величины. Эту векторную сумму можно построить (рисунок 2.29).
Пересечение линии, проведенной из конца вектора aBAц перпендикулярно AB (так направлен вектор aBAвр) и линии, проведенной из конца вектора aBn перпендикулярно BО2 (так направлен векторaBτ) определяют вектор aB, так как это построение отражает формулы:
Если данное построение выполнялось с соблюдением масштаба, то измерив длины соответствующих отрезков, можно определить по величине aB, aBτ, aBAвр.
Аналитическое определение величин этих векторов можно выполнить, спроецировав формулу (2.18) на выбранные оси координат (xBy). Расчет упрощается, если одну из осей совместить со штоком AB (рисунок 2.29):
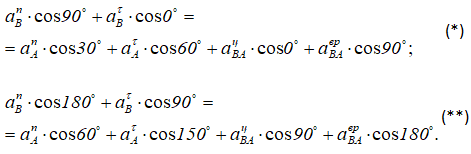
Из этих двух выражений определяются величины aBτ и aBAвp.
Из (*) и (**):
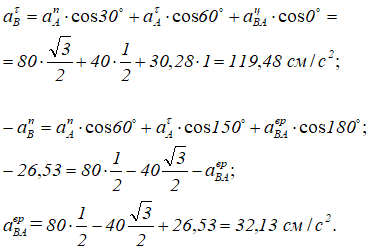
Определение этого вектора позволяет найти угловое ускорение штока AB:
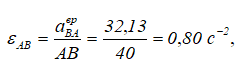
т.е. шток AB ускоряется против хода часовой стрелки, его вращение в данный момент замедленное. Определение aBτ дает возможность найти угловое ускорение звена BО2:
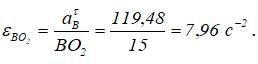
Звено BО2 вращается ускоренно (направления ωBO2 и εBO2 совпадают).
Полное ускорение точки B
Вектор aB составляет угол γ с звеном BО2:
Ускорение точки K находится из формулы:
![]()
в которой все слагаемые определяются: aAn и aAτ уже найдены:

Спроецировав формулу (***) на оси системы xKy, получим:
Полное ускорение точки K:
![]()
Определение угловой скорости и вращательного ускорения штока AB позволяют найти его мгновенный центр ускорений. Для этого определим угол β:
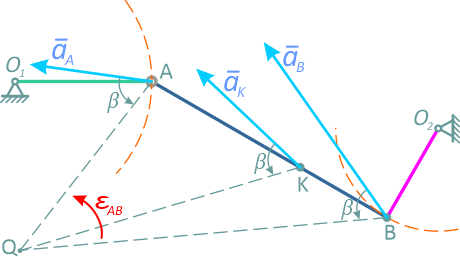
Отложив от известных ускорений точек A, и B угол β («в сторону ε»), получим точку пересечения этих лучей Q (рисунок 2.31), которая и является мгновенным центром ускорений штока AB.
Ускорения точек должны соответствовать соотношениям:

Задача решена!