
Решение задачи (РГР) К3 «Кинематический анализ плоского механизма» по разделу «кинематика» теоретической механики.
Пример определения скорости и ускорения точек треугольника в заданном положении.
Задача
Вершины А и В равностороннего треугольника ABD перемещаются соответственно по осям ОХ и OY. Известны АВ=40 см, VA=4√3 м/с, aA=100 м/с2, α=60°.
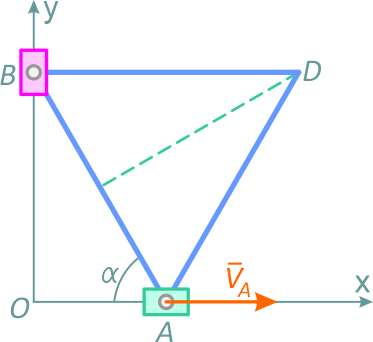
Провести кинематический анализ плоского механизма и определить скорости и ускорения точек В и D треугольника в заданном положении.
Другие примеры решений >
Помощь с решением задач >
Решение
Кинематический анализ и определение скоростей точек
Кинематический анализ:
а) По теореме о скоростях точек в плоскопараллельном движении:
![]()
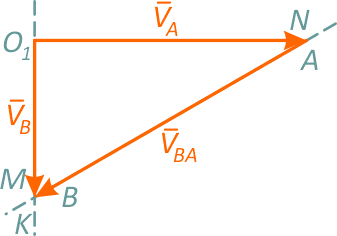
Направление и величина скорости точки А, VA известны, скорость точки В направлена вдоль оси OY, а скорость VBA перпендикулярна стороне АВ.
Строим равенство (1) (см. рис.2.2). Из точки О1, параллельно оси ОХ, вдоль которой движется точка А, откладываем в масштабе вектор VA. Из конца вектора VA проводим линию MN перпендикулярно стороне треугольника АВ (60º с вертикалью), тогда пересечение линии O1K параллельно оси OY и MN обозначит вектор VB. Полученный треугольник скоростей соответствует формуле (1). Умножив масштаб на длины векторов, получим их величины.
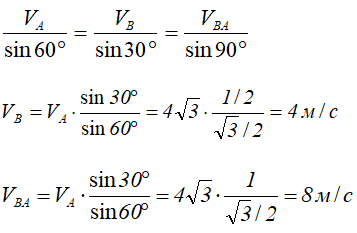
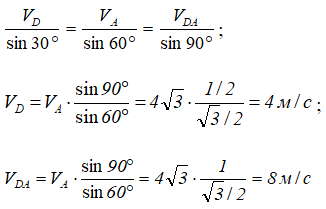
Если рис.2.2 строится без соблюдения масштаба, то определение величин скоростей производится с помощью теоремы синусов:
Поскольку VBA=ωAB×AB, то может быть определена угловая скорость вращения точки В вокруг А (или, что то же самое, угловая скорость вращения треугольника ABD).

В данном примере не известно направление скорости точки D. Поэтому для определения скорости точки D пишем:
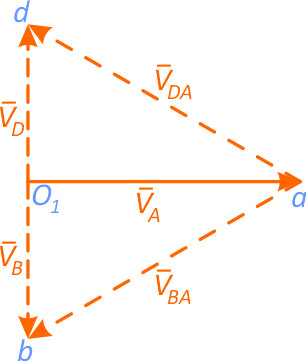
Аналогично (рис.2.2) делаем построение для определения скорости точки D (рис.2.3).
Линия ad перпендикулярна стороне треугольника AD, bd перпендикулярна BD. Точка D – точка пересечения линии ad и bd определяет конец вектора, проведенного из точки О1; отрезок ad соответствует вектору VDA, bd – вектору VDB. При известных углах можно определить величину скорости точки D — VD.
b) Определение скоростей точек с помощью мгновенного центра скоростей.
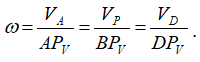
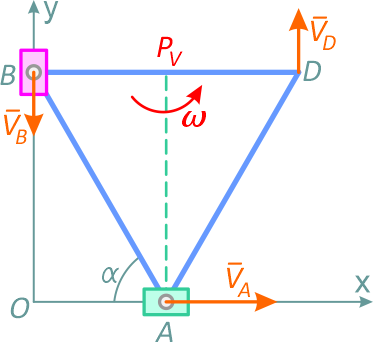
Мгновенный центр скоростей (МЦС) звена АВ — PV находится в точке пересечения перпендикуляров к скоростям точек (см. рис. 2.4) – (АPV ⊥ VA, BPV ⊥ оси OY, вдоль которой направлена скорость точки В), после нахождения МЦС — можно написать соотношение
Направление вращения треугольника определяем по вращению точки А вокруг точки PV (в данном случае против хода часовой стрелки).
Величина угловой скорости треугольника

Теперь определяем величины скоростей других точек:
Векторы скоростей перпендикулярны соответствующим отрезкам BPV и DPV, и направлены в сторону вращения.
Определение ускорений точек
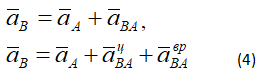
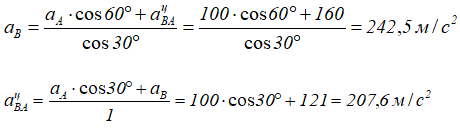
а) Ускорение точки В определяется по формуле
Ускорение точки А задано, т.е. известно по величине и направлению; ускорение aцAB направлено от точки В к точке А и вычисляется по формуле
![]()
Известно также, что вектор aB направлен вдоль оси OY, т.к. точка В движется вдоль этой оси, а вектор a-врAB направлен перпендикулярно линии АВ. С учетом сказанного можно построить эти векторы (рис. 2.5а) или построить равенство (4) (рис. 2.5б) и спроецировать его на выбранные оси координат BX1 и BY1:
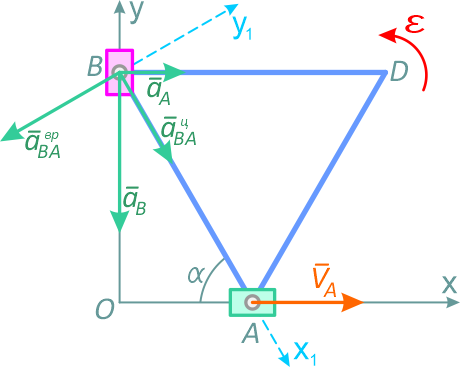
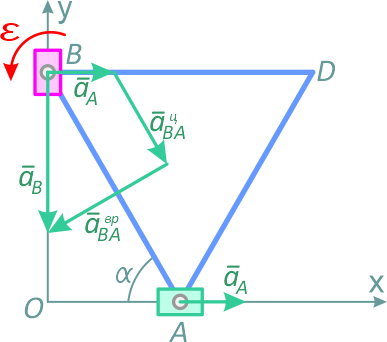
на ось BX1
![]()
на ось BY1
![]()
Оба ускорения aB и aврBA оказались положительными. Это значит, что предварительный выбор направления (рис. 2.5а) оказался верным.
Из формулы
![]()
можно определить угловое ускорение треугольника (или точки В при вращении вокруг точки А):
Направление углового ускорения определяется вектором aврBA. В данном примере видно, что точка В, вращаясь вокруг А, ускоряется против хода часовой стрелки.
b) Ускорение точки D определяется по формуле (см. рис. 2.6)
![]()
В этой формуле известны слагаемые правой части:
![]()
Этот вектор направлен от точки D к выбранному полюсу А.
Вектор a-врDA перпендикулярен отрезку AD и направлен соответственно угловому ускорению (ε) треугольника ABD. Так как и величина и направление ускорения точки D неизвестны, то векторное равенство (5) проецируем на выбранные оси координат (OX и OY).
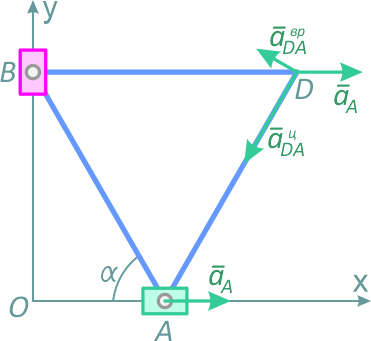
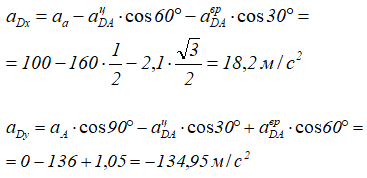
Полное ускорение точки D:

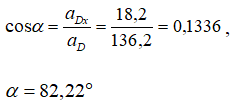
Направление ускорения точки D определяется с помощью направляющих косинусов:
cos α – косинус угла между осью OX и вектором ускорения:
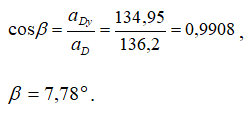
cos β — косинус угла между осью OY и вектором ускорения:
Кинематический анализ плоского механизма завершен.