
Силовым замыканием высшей кинематической пары механизма называют случай, когда необходимый постоянный контакт между кулачком и его толкателем при работе механизма обеспечивается постоянно действующей силой, прижимающей толкатель к кулачку, в качестве которого иногда может использоваться сила веса.
Наличие в кулачковых механизмах высшей кинематической пары, требует решения задачи обеспечения постоянного контакта толкателя с кулачком в процессе работы. Существуют механизмы с геометрическим замыканием этой пары, когда конфигурация звеньев препятствует их разъединению в процессе работы.
Этот способ реализуется при применении пазовых, двухдисковых, диаметральных кулачков. Однако это в значительной степени усложняет механизм, ухудшает его работу, ограничивает возможности кулачковых механизмов. Поэтому в большинстве случаев применяются механизмы с силовым замыканием этой высшей пары, когда постоянный контакт между кулачком и толкателем при работе механизма обеспечивается постоянно действующей силой, прижимающей толкатель к кулачку. Иногда это сила веса.
Но обычно дополнительно ставится пружина, т.к. силы веса недостаточно, чтобы компенсировать возникающие при работе отрывающие толкатель от кулачка силы инерции (кроме того, при работе большинства машин, в которых применяются кулачковые механизмы, толкатель не всегда занимает вертикальное положение и имеет верхнее расположение). Усилие, которое должна обеспечивать пружина, рассчитывается с учетом сил инерции, возникающих при работе механизма.
Максимальная сила инерции толкателя, отрывающая его от кулачка, соответствует максимальному отрицательному значению ускорения на диаграмме движения толкателя.
Решение представляет собой элементарную задачу статики и показано на рисунках 52 и 53:
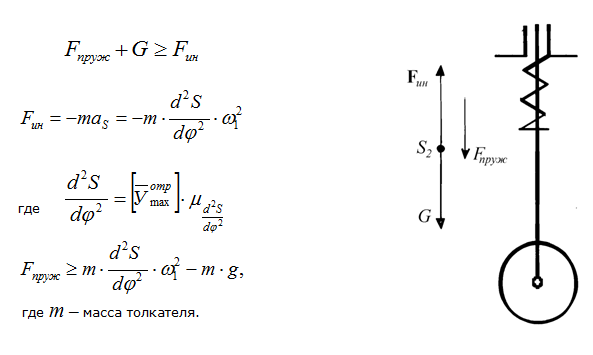

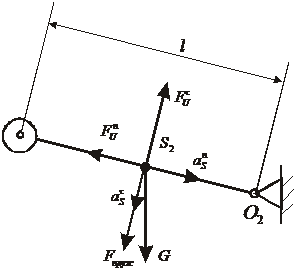
Рисунок 53 — Кулачковый механизм с коромысловым толкателем
Для определения усилия пружины составим уравнения моментов относительно точки О2:
