
Решение задач по теории механизмов и машин (ТММ) для студентов очной, заочной и дистанционной форм обучения.
1 Исследование и проектирование плоских рычажных механизмов
Методы кинематического и кинетостатического анализов, а в значительной степени и методы синтеза механизмов, увязаны с их структурой, т. е. способом образования механизмов. Поэтому исследование рычажного механизма необходимо начинать со структурного анализа. Методы структурного, кинематического и силового исследования рассмотрим на конкретном примере, приведенном на рисунке 1.
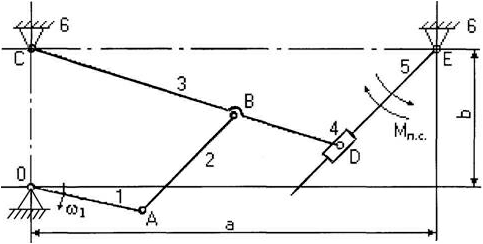
Рисунок 1 – Кинематическая схема плоского рычажного механизма
1.1 Структурный анализ плоского механизма
1.2 Кинематическое исследование плоского механизма
Задачей кинематики механизмов является изучение движения звеньев вне зависимости от сил, действующих на эти звенья. Кинематический анализ считается законченным, если для каждого звена механизма определены положение, скорость и ускорение двух его точек (или положение, скорость и ускорение одной точки звена и угловая координата, угловые скорость и ускорение этого звена).
Названные задачи могут быть решены графическим, графоаналитическим и аналитическим методами.
1.2.1 Построение положений звеньев механизма
1.2.2 Построение графика перемещений заданного звена
1.2.3 Построение диаграмм скоростей и ускорений методом графического дифференцирования
1.2.4 Кинематическое исследование механизма методом планов скоростей и ускорений
1.2.5 Аналитический метод кинематического исследования плоских рычажных механизмов
При этом методе все звенья, характерные размеры и перемещения звеньев изображаются в виде векторов. В результате образуются векторные многоугольники, на основе которых составляются векторные уравнения.
Рассматривая эти векторные уравнения в проекциях на оси произвольно выбранной системы координат, получают систему алгебраических уравнений для определения перемещений звеньев механизма (угловых – для звеньев, совершающих вращательное движение, и линейных – для звеньев, двигающихся поступательно).
При выполнении курсового проекта по курсу теории механизмов и машин студенту необходимо с помощью ЭВМ определить перемещения, скорости и ускорения выходного звена (звено №5) для 24 положений механизма. Для этого, опираясь на изложенный выше принцип, записывают уравнения перемещений (угловых или линейных в зависимости от задания) выходного звена №5 как функцию угла поворота входного звена (звено №1).
Полученное уравнение (или ряд уравнений) перемещений вводят в ЭВМ. Дифференцирование уравнений для определения скоростей и ускорений выходного звена производится на ЭВМ на основе алгоритма графического дифференцирования.
1.2.5.1 Пример расчета механизма с поступательно движущимся выходным звеном
1.2.5.2 Пример расчета рычажного механизма с выходным звеном, совершающим вращательное движение
1.3 Силовой расчет плоского рычажного механизма
1.3.1 Определение сил и моментов сил инерции
1.3.2 Силовой расчет по методу Н.Г. Бруевича
1.3.3 Определение потерь мощности на трение в кинематических парах
1.3.4 Определение уравновешивающего момента методом Н.Е. Жуковского
2 Кинематический анализ и геометрический синтез зубчатого механизма
2.1 Расчет кинематических и силовых характеристик механических передач
2.2 Кинематический анализ редуктора
2.3 Геометрический расчет пары зубчатых колес, нарезанных стандартным инструментом реечного типа
2.4 Построение картины внешнего эвольвентного зацепления
3 Динамический синтез кулачкового механизма
3.1 Построение графиков движения толкателя
3.2 Определение величины окружности минимального радиуса кулачка
Величина окружности минимального радиуса теоретического профиля кулачка для механизмов с роликовым толкателем определяется из условия отсутствия заклинивания, т.е. угол передачи движения не должен быть меньше заданного γmin.
Для кулачкового механизма с поступательно движущимся толкателем, имеющим плоскую тарелку, величина окружности минимального радиуса кулачка определяется из условия выпуклости его профиля.
3.2.1 Кулачковый механизм с поступательно движущимся точечным или роликовым толкателем
3.2.2 Кулачковый механизм с коромысловым роликовым толкателем
3.2.3 Кулачковый механизм с поступательно движущимся плоским толкателем
3.3 Построение профиля кулачка
3.4 Определение усилия пружины, обеспечивающей силовое замыкание высшей пары
Лекции по ТММ >
Другие примеры решений >
Помощь с решением задач >