Рассмотрим определение величины и направления скоростей и ускорений точек при сложном движении. Кориолисово ускорение, правило векторного произведения и правило Жуковского.
Теоремы о скоростях и ускорениях точек в сложном движении подробно изложены в учебниках по теоретической механике.
Абсолютная скорость точки при сложном движении определяется как геометрическая сумма переносной и относительной скоростей:
Каждое слагаемое в этой формуле определяется независимо друг от друга, исходя из соответствующего закона движения. В примере на рисунке 3.2 относительная скорость Vr определяется с учетом закона движения точки по оси Oy.
Переносная скорость определится как скорость точки M при вращении вместе с квадратом вокруг оси его вращения. Величина абсолютной скорости может быть определена с помощью теоремы косинусов:

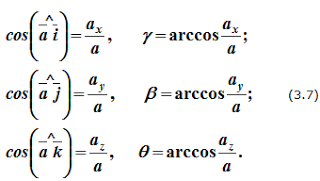
Для определения вектора абсолютной скорости можно равенство (3.1) спроецировать на выбранные оси координат, найти проекции абсолютной скорости, её величину и направляющие косинусы, то есть определить углы, которые вектор скорости составляет с выбранными осями.
Ускорение точки при сложном движении определяется как сума трех ускорений: переносного, относительного и кориолисова (поворотного):

Первые два слагаемые этой формулы определяются из соответствующих законов переносного и относительного движений. В случае неравномерных криволинейных движений эта формула имеет вид

Кориолисово ускорение определяется по формуле:

Величина этого ускорения
где α — угол между векторами переносной угловой и линейной относительной скоростями.
Направление кориолисова ускорения определяется двумя правилами:
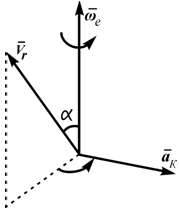
1. Правило векторного произведения при сложном движении
Согласно этому правилу вектор кориолисова ускорения перпендикулярен векторам ωe и Vr (или плоскости, проходящей через эти вектора, проведенные из одной точки). Направлен вектор aK так, что если смотреть ему навстречу, то кратчайший поворот вектора ωe до совмещения с вектором Vr происходит против хода часовой стрелки (рисунок 3.3).
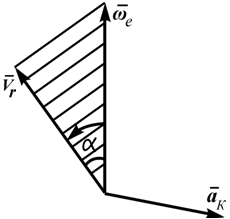
2. Правило Жуковского при сложном движении
Для определения направления кориолисова ускорения при сложном движении нужно спроецировать вектор относительной скорости в плоскость, перпендикулярную вектору переносной угловой скорости и полученную проекцию повернуть на в сторону переносного вращения (рисунок 3.4).
Из формулы (3.5) видно, что кориолисово ускорение равно нулю, если
- равна нулю относительная скорость;
- переносное движение — поступательное (ωe=0);
- угол между ωe и Vr равен 0o или 180o (вектор Vr параллелен оси переносного вращения).
Абсолютное ускорение точки при сложном движении определяется по аналогии с определением её скорости. Формула (3.3) проецируется на выбранные оси координат, и находятся проекции абсолютного ускорения на эти оси: ax, ay, az. Величина ускорения определяется по формуле:

Направление вектора абсолютного ускорения определяется с помощью направляющих косинусов, то есть определяются углы, которые вектор ускорения составляет с осями координат: